Sensoren
22.05.2021
die ersten Sensoren sind fertig.
Ich habe derzeit folgende aufgebaut:
Regensensor, Temperatur-/Feuchtesensor, Bumper, Ultraschall und IMU
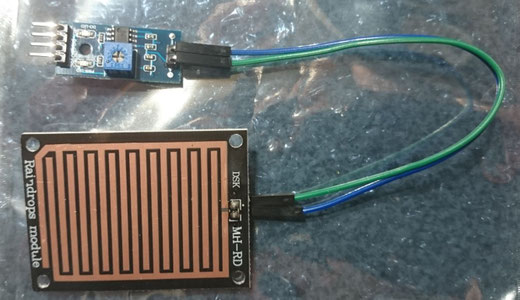
Regensensor
wird über drei Kabel (Vcc, GND und DO) und einem 3pol-XH-Stecker an der Buchse Rain auf dem Board angesteckt.
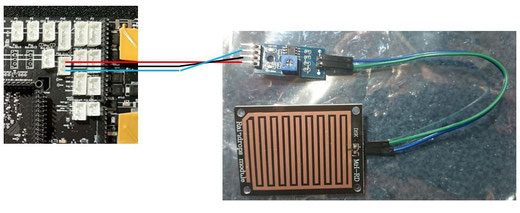
Anschluss am Mainboard:
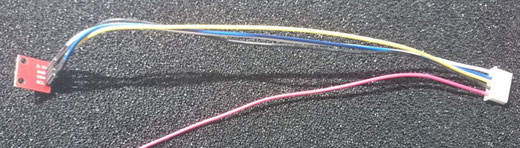
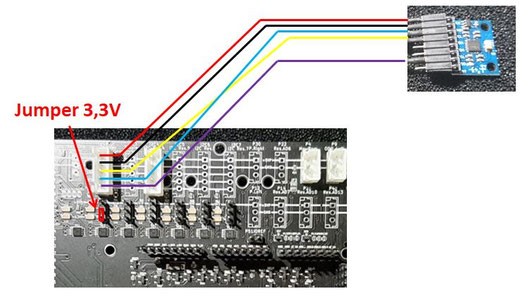
Temperatur- und Feuchtesensor
Wir an einem I2C-Bus Stecker auf dem Board angesteckt.
Von den fünf Pins werden nur vier benötigt:
Vcc, GND, SDA und SCL
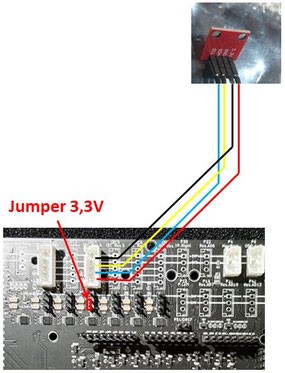
Anschluss am Mainboard und Jumper:
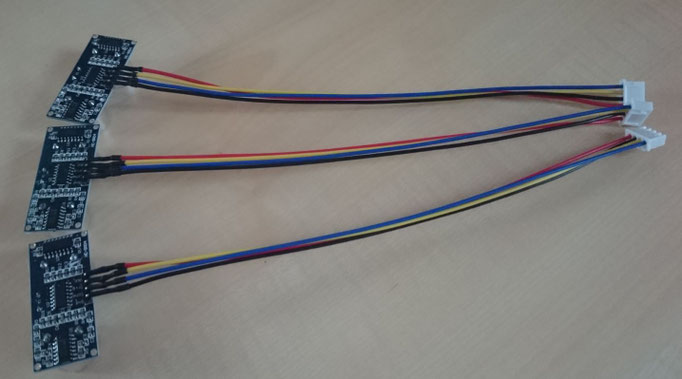
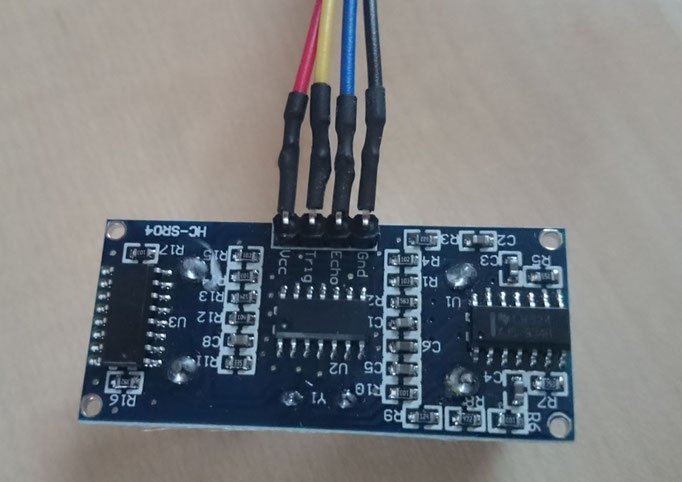
Ultraschallsensoren
werden über 4pol-XH-Stecker auf dem Board bei Sonar L, Sonar R und Sonar C angesteckt.
Belegung: Vcc, Gnd, Trigger und Echo
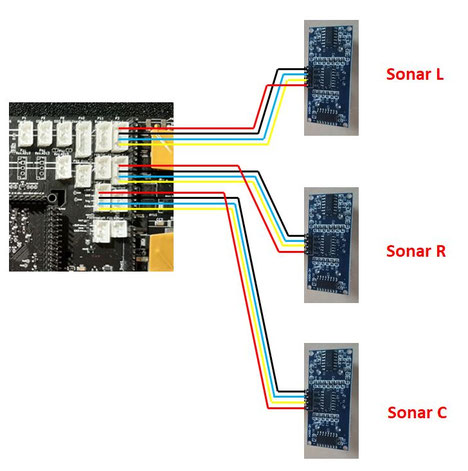
Anschluss am Mainboard:
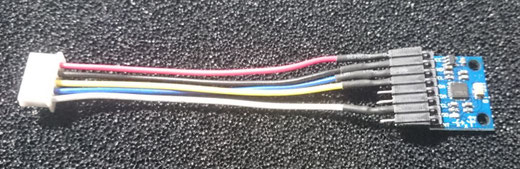
IMU
Die IMU hat Beschleunigungssensoren um Neigungen und Bahnänderungen erkennen zu können.
Ich habe die einfache Version MPU-6050 ohne Kompass gewählt.
Sie wird am I2C-Bus bei Compass angesteckt.
Belegung (siehe Sunray-Wiki):
Vcc (5V), Gnd, SDA, SCL und AD0 (3,3V)
Die IMU musste ich nachbestellen. Die wird nicht mitgeliefert.
Anschluss am Mainboard und Jumper:
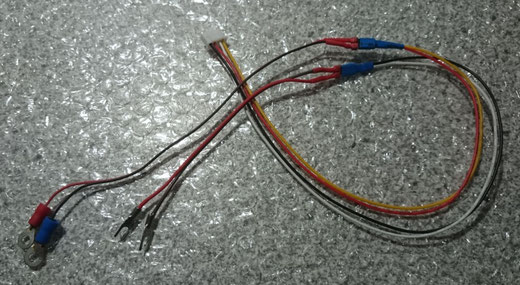
Bumper
die Bumper sind zwei Schalter, die von einer Stoßstange betätigt werden, wenn der Mäher irgendwo dagegen fährt.
Sie werden beide über einen 4pol-XH-Stecker auf dem Bord bei Bumper angesteckt.
ich habe mir einen kleinen Kabelbaum gemacht, den ich nochmal auftrennen kann.
Ich war mir nach der Videoanleitung nicht sicher, welcher Bumper nun genau auf dem