Konfektionierung der Kabel
12.05.2021
ich habe nun die ersten Kabel an die Ladebuchse, Schalter, usw. gebaut um das Chassis fertig machen zu können. Die Anleitungsvideos sind dazu recht verständlich. Ich habe mir nach dem ersten Video die entsprechenden Kabel herausgesucht und mit dem passenden Bauteil verbunden. Hier mal ein paar Detailbilder, die in dem Video nicht so eindeutig beschrieben sind.

Das sind die Kabel, die dazu dem Bausatz beiliegen.
Später hab ich dann noch ein 6pol-Kabel gefunden, welches ich wohl für das Bluetooth-Modul verwenden soll.
Hier alle Kabel, die ich mal vorbereitet hab. Ob die Polarität der grünen Schraubkontakte passt, muss ich später beim Anschließen ans Mainboard nochmal prüfen.



der grüne Stecker am Not-Aus wird nicht benötigt. Der wird später (in der Option den ganzen Roboter von der Batterie zu trennen) in die Spannungsversorgung eingeschleift.

Für den I/O-Taster habe ich von dem beiliegenden 1,5m Kabel 40cm abgeschnitten und an den Schalter gelötet.
Der Stecker ist so wie im Video ausgerichtet, dass man die Beschriftung lesen kann.
Dann ist der linke Pin (schwarz) Masse LED und der rechte (rot) + LED.
Unten (schwarz) ist COM Schalter, in der Mitte (rot) NO vom Taster.

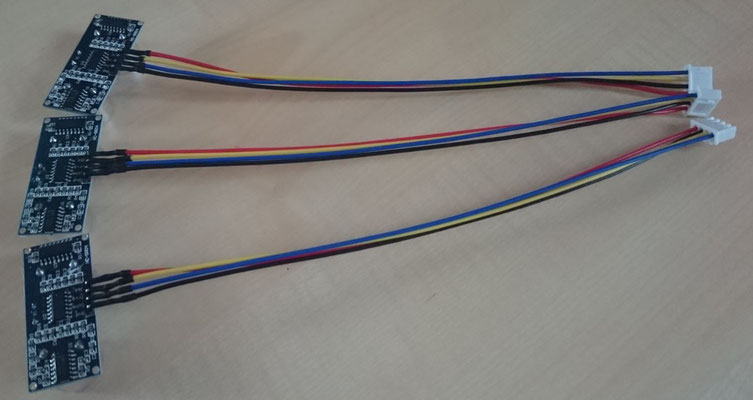
Für die Ultraschallsensoren habe ich die 5pol-Kabel mit XH-Stecker verwendet.
Wenn die richtig am Mainboard ausgerichtet sind, dann passen auch die Farben der Litzen gut zur Belegung:
Schwarz = Masse Rot = Versorgungsspannung
Dazwischen liegen dann die Ultraschallsignale Gelb = Trigger Blau = Echo.
Da ich die Buchsenleisten nicht so recht mag (ich habs noch nie geschafft, die ohne Verlust einer Buchse zu trennen), habe ich mich entschieden die Kabel direkt an die Sensoren zu löten.
Die Belegung am Sensor selbst hat nicht dieselbe Reihenfolge wie die Kabel am Stecker. Man muss also aufpassen und die Litzen an die richtige Stelle kontaktieren.

Nachtrag 15.05.2021
ich habs geschafft die Buchsenleisten so zu trennen, dass man keine Buchse dabei verliert. Es geht echt einfach.

Die Buchsenleiste an der zu trennenden Stelle in eine Zange einklemmen, so dass die Einkerbung noch leicht zu sehen ist.

Durch leichtes Biegen kann die Stelle gebrochen werden.
Der Bruch sieht sehr sauber aus.