Endlosbahn
21.12.24
Ich mache mir schon sehr lange Gedanken, wie man das Problem lösen könnte, dass man das Auto immer wieder umdrehen muss und in meinem Fall sogar wieder anschieben muss, damit es wieder weiter fährt.
Das wird manchmal kritisiert (wenn man es immer wieder anschiebt, dann könnte es ja endlos fahren) und im Falle vom Guinness-Buch ist es im Wettbewerb nicht erlaubt.
Auch wenn diese Kommentatoren keine Ahnung haben und für Wettbewerbe nicht einhaltbare Regeln aufgestellt haben, habe ich nach einer Lösung gesucht, die genau diese Möglichkeit bietet. Das Auto soll die gesamte Strecke von alleine fahren können, man muss es nicht umdrehen und man kann berührungslos die Richtung des Fahrzeuges korrigieren, ohne das Fahrzeug dadurch zu bremsen oder gar zu beschleunigen.
Die Lösung kam mir im Gym. Dort stehen einige Laufbänder, auf denen man stundenlang laufen kann, ohne sich auch nur einen Meter fortzubewegen. Am Ende ist man auf kleiner Fläche 10km gelaufen.
Das scheint genau die Lösung zu sein, die ich benötige.
Ich kann eine perfekte Bahn bauen (horizontal, eben und glatt, und relativ hart), und ich muss das Auto nicht mehr berühren während der Fahrt.
Nur wie korrigiere ich die Richtung? Das Auto wird immer in einer Kurve fahren, und wenn es eine sehr große Kurve ist, es wird über diese Länge messbar zur Seite weg fahren. Und auch wenn das Auto perfekt geradeaus fahren könnte, man kann es nie so auf die Bahn stellen, dass es nach einigen Metern immer noch mittig auf der Bahn fährt.
Die Fahrtrichtung muss also korrigiert werden können.
Wie kann ich also die Richtung des Autos beeinflussen ohne dem Auto Energie zuzuführen oder zu entziehen?
Ich habe über einige wenige Lösungen nachgedacht. So viele sind mir dazu gar nicht eingefallen:
- das Laufband kippen
- das Laufband verschränken
nach einigem Überlegen ist mir dann eine geniale Lösung eingefallen, die ich auch umgesetzt habe:
zwei Laufbänder.
Wenn beide Laufbänder nebeneinander stehen und das Auto mit einem Rad auf dem einen und mit dem zweiten Rad auf dem anderen Laufband fährt, kann ich die Richtung kontrollieren.
Ich kann ein Band im Vergleich zum anderen etwas nach vorne schieben oder etwas zurück.
Da das Auto ja mit je einem Rad auf einem Band steht wird das eine Rad eben auch etwas vor oder etwas zurück geschoben.
D.h. das Auto fährt jetzt in eine andere Richtung weiter.
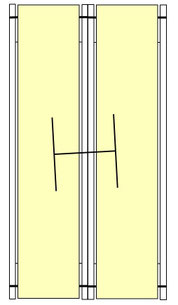
hier mal ein Konzeptbild.
das Auto steht mit jedem Rad auf einem eigenen Laufband (gelb).
Jetzt kann man sich leicht vorstellen, dass man das Auto, welches hier nach links fahren würde, etwas nach rechts drehen kann, indem man das rechte Laufband etwas gegenüber dem linken zurückzieht (oder das linke vorschiebt)
Damit wird das rechte Rad zurückgezogen und das Auto wird seine Richtung ändern.

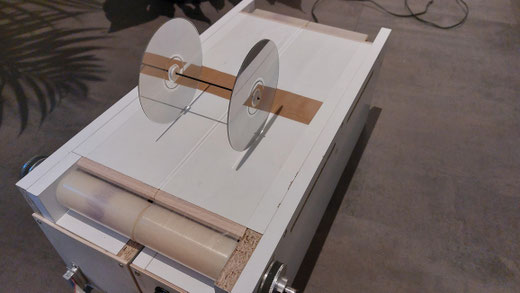
und so sieht das Gerät gerade aus.
Mit dem Kästchen unten im Bild kann ich die Geschwindigkeit der Bänder einstellen und die Richtung des Autos kontrollieren.
Die Laufbänder sind gerade zwei durchsichtige Kunststoffstreifen, die mit braunem Paket-Klebeband zusammengeklebt wurden.
Da muss ich noch ne neue Lösung finden. Das Paketband hat etwa 0,1mm Dicke. Das merkt mein Auto bereits. Ich hätte gerne eine Lösung, die ich nicht zusammenkleben muss.
das ist natürlich kein Mausefallenauto. Es soll nur die Größe meines Autos, das da drauf fahren soll, darstellen.

Ein Zählwerk zählt die Umdrehungen des Bandes mit einer Lichtschranke. Jedes Mal, wenn der braune Klebestreifen an der Lichtschranke vorbei fährt, wird um eins hochgezählt.
Da das Band genau einem Meter lang ist entspricht der Stand auf dem Zählwerk genau der Strecke, die das Band zurückgelegt hat.
Mit dem Drehknopf links neben dem Zähler kann ich die Helligkeit der LED, die den Fotosensor beleuchtet, einstellen.
auf diesem Video sieht man wie das Auto so gesteuert werden kann, dass es auf der Bahn bleibt:

und hier sieht man das "Auto" auf der Bahn fahren. Weil es ja keinen Antrieb hat, habe ich zwischen die beiden Bahnen einen dünnen Metallstab eingeklemmt, der das Auto "anschiebt"