Ardumower (verkauft)
25.04.2021
wir sind schon seit längerem am Überlegen, ob wir uns nicht einen Rasenmäherroboter zulegen sollen. Heuer haben wir uns endlich dazu durchgerungen und ich habe mich auf die Suche nach einem geeigneten Modell gemacht.
Die meisten Modelle benötigen eine Drahtschleife um den Mähbereich zu begrenzen.
Sie verläuft von der Ladestation einmal um den ganzen zu mähenden Bereich herum und wieder zur Ladestation zurück.
Bei diesem Konzept fährt der Robbi an dem Kabel entlang in seinen Mähbereich und mäht dann in mehr oder weniger zufälligen Bahnen seinen Mähbereich. Muss er zurück in die Ladestation sucht er sich das Begrenzungskabel und fährt daran entlang zurück zur Ladestation.
Manche Modelle benötigen zusätzlich einen zweiten Leit-Draht, der dann von der Ladestation aus in die zu mähenden Flächen führt.
Dieses Konzept soll den Robbi schneller dahin bringen wo er mähen soll und wieder zurück in die Ladestation.
Durch die Schleifen und deren Mähkonzept gibt es aber auch schon ein paar Nachteile:
1. es muss schon mal feststehen, wo die Ladestation hin muss.
das erscheint auf den ersten Blick kein Nachteil zu sein. Irgendwann muss man ja definieren, wo die stehen soll.
Aber: der Ort muss je nach Schleifenkonzept an die richtige Stelle gelegt werden. Die Ladestation muss dann an einem Ende des
gesamten Mähbereiches stehen, so dass die Leitschnur von der Ladestation aus in alle Mähbereiche führen kann.
Dort muss dann auch ein Stromanschluss zur Verfügung stehen.
2. der Mähbereich muss mit der Schleife definiert werden.
Auch das erscheint erstmal kein Nachteil zu sein. Üblicherweise weiß man ja welcher Bereich gemäht werden soll.
Was ist aber, wenn man den Bereich ändern möchte? Was ist, wenn ein Teil davon eine Zeit lang nicht gemäht werden soll?
Entweder akzeptiert man es, dass der Robbi den Bereich einfach befahren will, aber durch das Hindernis, das den Mähbereich
evtl. jetzt stört, daran gehindert wird (er stößt dann jedes Mal daran an und kehrt wieder um) oder man legt die Schleife neu.
3. an Engstellen muss die Drahtschleife sehr nahe zusammen oder sogar übereinander gelegt werden.
Ich habe damals unser Grundstück blöderweise so eingerichtet, dass ich einen recht engen, aber langen "Rasenschlauch" mähen muss.
Der Begrenzungsdraht würde hier nur in einem Abstand von etwa 20cm liegen. Damit kann der Robbi bereits mal Probleme haben.
Er würde dann an dem Kabel entlang fahren (entweder zum Mähen oder in die Ladestation) kann aber an der Stelle mal auf das
nebenan liegende Kabel "springen". Dann fährt er an diesem entlang wieder in die andere Richtung, in die er ja eigentlich nicht fahren
wollte.
4. beim Vertikutieren oder Neuanpflanzung muss man das Kabel beachten
Die Kabel werden üblicherweise unter die Grasnarbe gelegt. Sie sind aber noch etwas innerhalb der Rasenfläche, weil der Robbi ja nicht
in den angrenzenden Beeten oder Hecken herumfahren soll. Will man einen guten Rasen haben, wird man um das Vertikutieren
nicht herumkommen. Es kann dann leicht passieren, dass das Kabel dabei durchtrennt wird.
Auch beim Neuanpflanzen muss man immer bedenken, bevor man mit dem Spaten einsticht, dass da ein Kabel liegt.
5. lange enge Passagen
solche Abschnitte stellen für die meisten Robomäher echte Probleme dar. Soll da nicht nur durchgefahren, sondern auch gemäht
werden, ist das manchmal nicht machbar. Der Mäher verheddert sich in solchen Schläuchen gerne. D.h. er fährt bis zu einer
Begrenzung und kehrt dann wieder um, dann fährt er zur nächsten Begrenzung usw.
In den Engstellen kann er sich da stundenlang aufhalten. Die Hersteller versuchen das Problem zu lösen, ob das aber bei jedem
individuellen Grundstück zuverlässig funktioniert, muss jeder ausprobieren.
Irgendwie hat mir das mit den Kabeln in dem Boden nie so richtig gefallen. Aber es gibt ja keine Alternative....oder doch?
Doch die gibt es! Eher durch Zufall als durch gezielte Suche, bin ich auf ein kleines Startup gestoßen, das mit seinem Robbi ein anderes Konzept verfolgt: der Ardumower von Marotronics.
Der Ardumower kann, wenn man möchte auch an einer Schleife entlang fahren, kann aber auch nur durch GPS gesteuert werden.
Das GPS (Global Positioning System) ist normalerweise für den Privatnutzer zu ungenau, um einen Robbi damit in seinem Grundstück herumfahren zu lassen.
Es gibt aber eine Zusatzelektronik, die die Positionsfehler des "normalen" GPS korrigiert und dem Robbi dann genau mitteilt, wo er gerade ist. Mit dieser Zusatzelektronik wird daraus ein GPS-RTK (Wiki), welches den Robbi zentimetergenau durch der Garten lotsen soll.
Er fährt dabei nicht wild, kreuz und quer, sondern seine Route wird komplett berechnet und vorgegeben.
Damit fährt er den Mähbereich auch besonders effektiv ab. Das schont den Akku und den Robbi (und evtl. auch einen selbst und die Nachbarn)
Wenn das gut funktioniert, eliminiert es die obigen Nachteile des Schleifenkonzeptes:
- Die Ladestation ist unabhängig von der zu mähenden Fläche.
- die Ladestation kann völlig frei an einen neuen Ort verlegt werden
- Engstellen sind völlig egal, solange der Robbi überhaupt durchfahren kann, kann er auch mähen.
- Mähbereiche können sehr einfach geändert werden.
- es können keine Drähte im Boden mehr durchtrennt werden (es sei denn es liegen noch andere Leitungen darin)
Weitere Vorteile:
- der Robbi kann völlig wirre Wege zur Ladestation fahren. Die kann weit weg vom Mähbereich oder auch mittendrin stehen
- Es können weit auseinanderliegende Mähbereiche gemäht werden
- Er fährt auch auf befestigten Wegen (gepflastert, geteert,..) genau.
- Durch Zusatzelektronik kann er geeignete Türen öffnen um in einen Mähbereich zu gelangen
- Es können problemlos Bereiche beim Nachbarn mit gemäht werden, sofern der Robbi gefahrlos für sich und andere da hinkommt.
Genau das ist es was ich gesucht habe! Die Idee ist einfach klasse. Und basteln tu ich ja gerne.
Das GPS-Konzept wird übrigens auch von den "großen" Herstellern verwendet. Z.B. für Profimäher für große Flächen (Parks, Flugplätze, Golfplätze,...) Dort wird es nämlich schwierig Drahtschleifen ganz außen herum zu legen.
Aber erstens sind die Mäher eben viel zu groß und zweitens viel zu teuer.
Die Sache hat jetzt nur einen Haken (Stand 25.04.2021):
Der Ardumower ist noch nicht komplett fertig entwickelt. Trotzdem hat er schon einen Entwicklungsstand erreicht, mit dem man schon zurecht kommen wird.
Es gibt aber z.B. noch keinen Mähplan. Man kann (noch) nicht erwarten, dass völlig autonom gemäht wird, vielleicht sogar noch während man im Urlaub ist.
Ob der Ardumower Sicherheitsanforderungen einhält, wie z.B. Abschalten des Messers, wenn er auf ein Hindernis auffährt (Kinderfuß) weiß ich noch nicht. Unbeaufsichtigt sollte man ihn derzeit noch nicht fahrenlassen. Eine Hinderniserkennung zum Umfahren hat er.
Er wird als Bausatz ausgeliefert und erfordert etwas Bastelleidenschaft und evtl. auch etwas Bastelgeschick.
Zusätzlich wird noch eine App benötigt, mit der dem Robbi die Mähfläche eingelernt wird und über die noch verschiedene Einstellungen vorgenommen werden können. Die App wird derzeit auch ständig weiterentwickelt und muss für etwa 5€/Monat in die Kosten mit einberechnet werden.
Eine Ladestation muss (darf) man sich selbst bauen. Vielleicht wird eine Standart-Station ja irgendwann mal mit entwickelt und evtl. auch als Bausatz angeboten.
Außerdem macht das GPS-RTK den Robbi nicht ganz billig.
Die Zusatzelektronik erhöht den Preis um etwa 800€.
Ich habe mir die RTK-Version mit Standard-Gehäuseteilen bestellt, habe mir aber gleich Brushless-Motoren gegönnt.
Preis Bausatz: 1638€
Dazu kommt noch
- ein Akku für etwa 150€
- die Selbstbau-Ladestation, für die ich mal 100€ einplane.
Gesamtkosten betragen dann ca. 1900€.
Für die App muss ich auch noch 100€ für die Nutzung der ersten beiden Jahre einplanen.
Das Konzept ermöglicht übrigens auch komplette Eigenkonstruktionen.
Ein Mähwerk, zwei Mähwerke, Radantrieb, Kettenantrieb, eigene Gehäuse, vorhandene Mäher umrüsten,... alles ist möglich.
Mehr Infos auf der Homepage vom Ardumower oder im Shop von Marotronics.
Es gibt auch ein wirklich sehr freundliches und hilfsbereites Forum. Hier wurde mir schon sehr bei der Entscheidung geholfen und ich bin auch noch nie irgendwie blöd "angeredet" worden.
Da ich mir den Ardumower -Bausatz nun bestellt habe, werde ich den Aufbau natürlich hier auf meiner HP auch beschreiben.
Es gibt seit letzter Woche aber sehr gute Aufbau-Tutorial-Videos auf dem YT-Kanal von Ardumower, so dass ich nicht so sehr in jedes Detail gehen werde. Nur da, wo ich Infos gefunden habe, die evtl. nicht so eindeutig beschrieben sind, gehe ich, wenn ich das erfolgreich gelöst habe, näher darauf ein. Da ich ja keine Konkurenzplattform zum Ardumower-Forum machen will, werde ich manche Themen, wenn es hilft Fragen zu beantworten, auch dort nochmal beschreiben.
Ich möchte den Aufbau, die Probleme, die ich dabei hatte und deren Lösungen irgendwo beschreiben und das muss ich natürlich auf meiner eigenen Homepage tun.
Ich werde den Aufbau wieder Blog-artig machen, wie ihr das evtl. von meinen anderen Themen her bereits kennt.
Nachtrag 12.05.21
Noch zur Info: ich habe mir gleich die Brushless-Version bestellt. Dazu habe ich noch keine Anleitungen gefunden.
Es ist auch das Mainboard 1.4 bereits enthalten, für das es wohl ebenfalls noch keine Anleitungen gibt.
Ich werde hier berichten, wie mir der Aufbau gelungen ist.
Ich werde doch ein paar Unterseiten zur bessere Übersicht einbauen. Die Unterseiten sind in der Reihenfolge des Aufbaus sortiert.
Was noch nicht mit Inhalt gefüllt ist, habe ich noch nicht begonnen.
Alle Fragen und Antworten zu Themen bei denen ich Hilfe benötige, sind in dem Link zum Forum zu finden.
Ich kann nur immer wieder erwähnen, dass einem dort beim Aufbau wirklich sehr geduldig geholfen wird.
Also, auf zum Aufbau Ardumower mit GPS-RTK, Board 1.4 und brushless Motoren
08.05.2021
der Ardumower-Bausatz ist heute angekommen. Ich hab mich natürlich gleich mal ans Auspacken und Zusammenbauen gemacht.
Um dann mit dem Konfektionieren der Schalter, Kabel, Stecker, usw. beginnen zu können habe ich einen ersten Blick auf die nächsten Beutel und Schachteln geworfen: oh weh oh weh. Ich bin gespannt. Es muss wirklich fast alles zusammengebaut werden.
Ich habe ein Sammelsurium an Elektronikplatinen und Einzelteilen, die jetzt alle irgendwie und irgendwo verbaut werden sollen. Und das Ganze nur mit online-Anleitungen, die zum Teil einen älteren Stand beschreiben oder es gibt noch gar keine dazu.

Hier mal die verschiedenen Mechanik-Kleinteile.

alle Elektronik-Platinen, Stecker, Sensoren, usw...
1 Ultraschallsensoren
2 Stecker, Schalter,..
3 Stiftleisten, Buchsenleisten, Klemblöcke, ...
4 DC-DC-Wandler
5 RTC Real-Time-Clock (Uhr)
6 Brushless Adpater-Board
7 Bruhsless Treiber
8 Mainbaord 1.4
9 Adafruit Grand Central M4
10 Regensensor
11 neues WiFi/BT-Modul ESP32
12 "altes" BT-Modul HM10
13 Temperatur- /Feuchtesensor

... und die Kabel
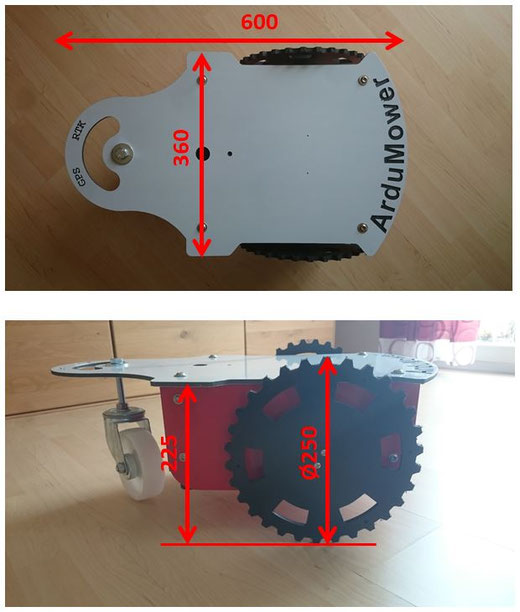
Ich konnte es natürlich mal wieder nicht abwarten und hab mal die wichtigsten Gehäuseteile zusammengebaut (auch um die Abmessungen mal ermitteln zu können.)
Die Schutzfolie ist auf allen Gehäuseteilen noch drauf.
Hier links also mal die Abmessungen des Ardumowers ohne weitere Anbauteile wie Not-Aus oder Antennen.
03.07.22
Unser Ardumower ist mittlerweile verkauft.
Leider haben wir in unserem Grundstück einen Bereich zwischen Garage und Haus in dem er einfach nicht mit GPS mähen kann.
Dort bleibt er immer irgendwann stehen, weil er kein GPS-Fix mehr hat.
Außerdem geht mir persönlich die Softwareentwicklung zu langsam vorwärts.
Zu dem Zeitpunkt zu dem ich ihn im Grundstück fahren ließ, war die Patternberechnung noch nicht so perfekt, wie ich mir das vorgestellt habe. Er fährt viele Wege mehrfach um von einem in den anderen Bereich zu kommen. Diese Wege werden irgendwann zu "Trampelpfaden". D.h. ohne aufwändige Nacharbeit des Patterns wollte ich den nicht jeden Tag im Grundstück fahren lassen. Neue Pattern einzurichten geht zwar, aber ich hätte jedesmal den Anspruch die wieder aufwändig zu optimieren. Wenn sich dann am GArten was ändert, geht das alles wieder von vorne los.
Meine Verbesserungsvorschläge dazu im Forum waren diese hier:
Mir war der Betrieb einfach insgesamt noch zu aufwändig. Ich brauch doch einen Roboter, den ich hinstellen und laufen lassen kann.
So werde ich nun eine Schleife ziehen und einen einfachen Zufallsmäher fahren lassen.
Evtl. berichte ich von meinem Erfahrungen hier auf meiner Homepage.