Zusammenbau
12.06.2021
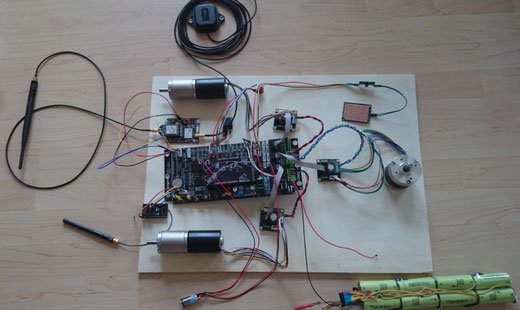
Vor dem Einbau der Elektronik in das Chassis habe ich sie außerhalb aufgebaut und getestet. So kann man leicht an die Bauteile ran und evtl. doch nochmal was korrigieren.
Der Akku unten rechts ist einer meiner Heli-Akkus mit 8 A123-Zellen.
Nachdem Software und GPS programmiert waren und die Elektronik funktionierte, konnte der Einbau erfolgen.
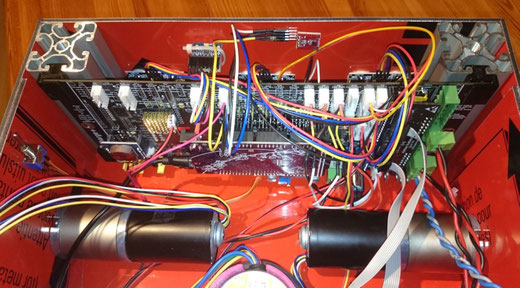
Das Mainboard wird mit den vier 3D-Druck-Haltern an dem Boschprofil befestigt. Die haben in dem Schlitz in dem die Leiterplatte dann liegen soll eine kleine Aufdickung, die ich an den oberen beiden Haltern entfernt habe. Ansonsten lässt sich die LP nicht durch den ganzen Schlitz hindurch schieben.
Ich habe mir am Boden des Chassis zwei kleine Gummidämpfer (lagen dem Bausatz bei, keine Ahnung für was die sonst gebraucht worden wären) aufgeklebt, so dass die Leiterplatte nicht ganz am Boden aufliegt.

Die IMU und den Temperatursensor habe ich mit UHU-Por festgeklebt.
Der klebt ausreichend stark, bleibt elastisch und lässt sich im Notfall wieder restlos entfernen.
Die IMU muss ausgerichtet im Rover sitzen. Ich habe die deshalb auf einen kleinen Holzklotz gesetzt.

Statt des JP8, der definiert, ob die Elektronik dauerhaft an oder automatisch abgeschaltet wird, habe ich einen Wechselschalter eingebaut. Mit dem kann ich jetzt recht leicht mal auf Dauer-An stellen, wenn es benötigt werden sollte.
Auch den hab ich einfach mit UHU-Por an die Seitenwand geklebt.
Nachtrag 19.06.2021: Ich habe den Schalter mittlerweile an der Vorderseite oberhalb der Ultraschallsensoren aus dem Gehäuse herausgeführt. Ansonsten muss der Rover, wenn man auf Dauer-ON schalten möchte immer aufgeschraubt werden.

Ich möchte in den Deckel des Robbis keine Löcher mehr reinbohren, die direkt ins Innere führen. Jedes Loch muss irgendwie sicher gegen Wasser von oben abgedichtet werden.
Ich habe mich deshalb entschieden, alle Löcher, die für Kabeldurchführungen benötigt werden in die Rückwand zu bohren.
Dort habe ich nun DREI (im Bild sind noch zwei dargestellt) 9mm-Löcher für die Antennenkabel für W-Lan und GPS und ein 6mm-Loch für die Kabel des Regensensors gebohrt.
Nachtrag 19.06.2021: es werden drei 9mm-Löcher benötigt. Zwei für die WLAN-Antennen und eine für die GPS-Antenne.
Die sollten auch nicht mittig in die Rückwand gebohrt werden, weil da hinter der Außenwand später der NOT-Aus-Taster sitzt.

Damit der Akku bei der wahrscheinlich doch etwas holprigen Fahrt nicht so im Schacht rumhüpft, habe ich einen Schaumstoffrahmen gemacht, der den Akku aufnimmt.
Zufälligerweise habe ich noch einen passenden Schaumstoff übrig gehabt. Mit der Bandsäge lässt sich der super aussägen.

der Akku ist nur schön geschützt in seinem Schacht.
Probleme mit der Wärmeentwicklung sehe ich nicht. Der Akku hat immer noch die Möglichkeit über die Seitenflächen zu entwärmen. Außerdem wird der Akku wahrscheinlich sowieso nicht sehr warm werden. Die Motoren benötigen ja kaum Leistung.
Zur Not kann ich den Schaumstoff oben immer noch entfernen.
19.06.2021
den Schaumstoff habe ich mittlerweile unterhalb des Akkus etwas dünner geschnitten.
Der Akku muss wegen des Not-Aus-Tasters fast ganz unten am Boden aufliegen.
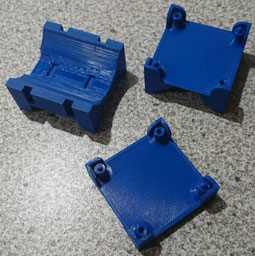
um die Motortreiber-Platinen sauber im Rover befestigen zu können, kann man sich auf der Ardumowerseite STL-Daten herunterladen um diese 3D-Druckteile zu erstellen.
Ich habe mir zwei Versionen mit halbrunder Unterseite für die Antriebsmotoren machen lassen und eine mit einer flachen Unterseite für den Mähmotor.
(Danke an Moritz an der Stelle fürs Drucken der Teile. Perfekt eingestellter 3D-Drucker!)
Die Links im Text führen zu der Downloadseite. Die Links findet man auch hier unter 3D-printed PCB-holder.
Für die BL-Motoren passt der Durchmesser der halbrunden Geometrie nicht ganz, ist aber trotzdem gut verwendbar.
Die eigentliche Aufnahme der Kabelbinder ist etwas zu klein. Da passt ohne Nacharbeit kein Kabelbinder durch.
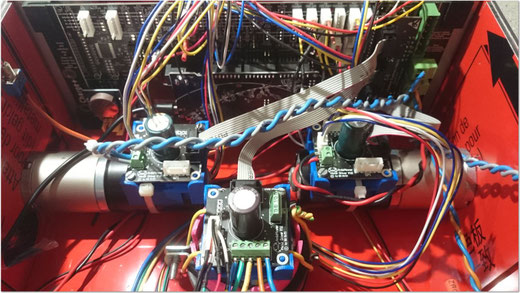
Ich habe bei den Antriebsmotoren deshalb nur einen Kabelbinder einfach um den Motor und den Halter herumgelegt. Der passt gut zwischen die Platine und den Halter durch.
Den Halter für den Mähmotor habe ich mit einer 1,5mm² Installationsleitung an der Klemmschelle des Mähmotors befestigt. Hier würde es sich anbieten, das rosa Adapterstück für den Brushless-Mähmotor gleich mit einer Aufnahme für den Platinenhalter zu versehen.
Die Abstände von den Stecker des Mainboards sind leider so groß, dass meine Stromversorgungskabel für die Treiberboards nicht lang genug waren. Die Odometriekabel reichen gerade so, wenn man die Orientierung der Stecker richtig wählt.
Übrigens sind 1,5mm² Installationskabel sehr geeignet um die als Stromversorgungskabel für die Treiberboards zu verwenden.
Die passen super in die kleinen Klemmblöcke und lassen sich sehr gut verdrillen. Wobei ich bei den Brushlessmotoren glaube, dass ein Verdrillen nicht viel bringt. Hier ist ja nur Gleichspannung auf den Leitungen und kein schnell schaltendes PW-Signal wie für die Bürstenmotoren. Ich hab sie trotzdem verdrillt, weil es definitiv nicht schadet und die Kabel so sauber geführt werden können.
Ich habe den Mähmotor am Mainboard mit einem 1,5²-Kabel (blau, braun rechts unten im Bild) angeschlossen.
USB-Kabel:
Für den Anschluss des USB an die USB-Durchführung am Gehäuse wird ein zusätzliches USB-Verlängerungskabel benötigt.
Es muss ein ca. 30cm langes Adapterkabel von Mini-USB auf "normal" USB sein.
Das muss auch extra bestellt werden, weil es dem Bausatz nicht beiliegt. Das USB-Verlängerungskabel, welches dem Bausatz beiliegt, ist später für den Anschluss des Rovers am PC geeignet.